Sketch of the ideas:
Consider each sampling of the balls as a 1-dimensional random walk, which takes only two possible directions: left or right, at each step. The directional path (i.e., we don’t consider its length but only direction) of the ball is then equivalent to a sequence of L/R (or -1/1, or 0/1, whatever you like) of length $n$, where $n$ is the number of rows of the Galton board (the size of the map).
To implement a simulation where the principles are so described, we use the object-oriented programming (OOP) in Python. We implement each trial as a class, where the attributes of it consisting of
- the size of the board (number of rows)
- the number of balls
- and some other parameters that we may need.
Then for each sampling of the balls:
- the method
sample()will be called, which return a list of dicts as the result of the sampling, where the keys are:- the path
- the final position of the ball, which is the sum of the path
- not only the return value, but also result will be appended and stored as attributes
trial.sample_resultsof the trial object.
- the method
Use a for loop to simulate every ball’s movement one by one, so that it’s then statistically `independent’ from each other.
Gather the results of those simulations and store them as attributes of the trial object.
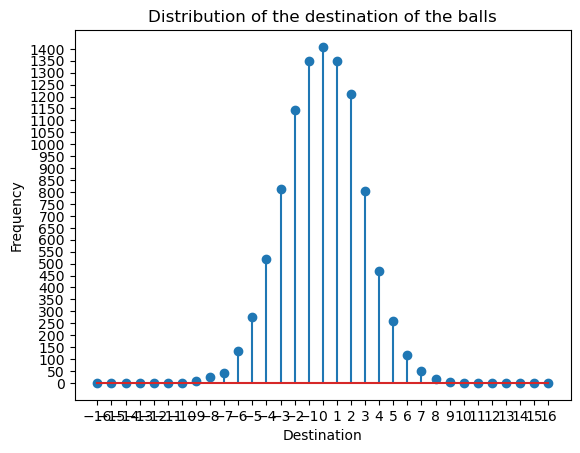
It’s then another new task to analyze the results, for example, to verify the central limit theorem, or to calculate the probability of the balls falling into each bin, etc.
Remark
- The so called ‘sequence’ in 1., is a mathematical concept, and in Python we shall use a list to do it. If we denote the step at each of the two directions as $-1/2$ and $1/2$, the the sum of this sequence will give us the final position of the ball, assuming the starting point is $0$.
- I am still thinking if we need any advanced libraries to simulate this random walk process. But I guess it may not be so, because the overall math involved here is very simple. Maybe only
randomwould be sufficient. - Important attributes that must be included in 2. : the size of the board, and the number of the samplings. Because those two, when going to infinite, would give a mathematical approximation of the normal distribution. There is one important difference between the two parameters. While the first one, the size, is fixed, that is, you cannot change it after starting the trial, the second one is not, because the independent property of the distribution. Which means, from a point of view of coding, we can have a slider to interactively change the second one and see the result, but the we cannot do so for the first one.
Now let’s start coding.
The code
| |
| |
Ball 0 path: [0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5] destination: 1.0
Ball 1 path: [-0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5] destination: 0.0
Ball 2 path: [0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5] destination: -1.0
Ball 3 path: [0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5] destination: 3.0
Ball 4 path: [0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5] destination: 0.0
Ball 5 path: [0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5] destination: 0.0
Ball 6 path: [-0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5] destination: -2.0
Ball 7 path: [-0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5] destination: 2.0
Ball 8 path: [-0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, -0.5] destination: -2.0
Ball 9 path: [0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5] destination: 4.0
Ball 9990 path: [-0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5] destination: 1.0
Ball 9991 path: [-0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5] destination: -2.0
Ball 9992 path: [-0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5] destination: -2.0
Ball 9993 path: [0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5] destination: 6.0
Ball 9994 path: [0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5] destination: -3.0
Ball 9995 path: [0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, -0.5, -0.5] destination: 1.0
Ball 9996 path: [-0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5] destination: 2.0
Ball 9997 path: [0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5] destination: 2.0
Ball 9998 path: [0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, 0.5, 0.5, -0.5, -0.5, 0.5, 0.5, 0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, -0.5, 0.5, 0.5, 0.5, 0.5] destination: 2.0
Ball 9999 path: [0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5, 0.5, 0.5, -0.5, -0.5, 0.5, -0.5, -0.5, -0.5, 0.5, 0.5, -0.5, 0.5, -0.5, 0.5, 0.5, -0.5, 0.5] destination: 2.0
| |
The number of balls that end up at the destination 11.0 is: 0
The number of balls that end up at the destination -12.0 is: 0
| |